
Welcome to our Community
Wanting to join the rest of our members? Feel free to sign up today.
Sign up

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Anafi + QGroundControl
- Thread starter gundy27
- Start date
MustangPhil
Well-known member
I don’t think the Anafi is compatible with QGroundControl (that requires Mavlink protocol that the Anafi is not equipped with).
For planning, there are other alternatives such as the FlightPlan add-on (1 or 2$ option in FF6) or for patterns, I use Pix4Dcapture (the free version).
Other possibilities are also listed along the forum... from free tools to expensive ones...
For planning, there are other alternatives such as the FlightPlan add-on (1 or 2$ option in FF6) or for patterns, I use Pix4Dcapture (the free version).
Other possibilities are also listed along the forum... from free tools to expensive ones...
Take a look here on page 34 https://www.parrot.com/assets/s3fs-public/2020-07/white-paper-anafi-usa-v1.4_en_new.pdf
Rodrigo del Pedregal
Well-known member
- Joined
- Mar 27, 2020
- Messages
- 87
- Reaction score
- 20
on page 34
MAVLink compatibility The ANAFI USA platform is compatible with the open source protocol MAVLink v1, that allows real time data exchange between the drone and a control station. ANAFI can be piloted manually or through an automatic flight plan from any MAVLink V1 station, such as QGroundControl.
What actually does it means for a simple Anafi? Not Usa, It is also compatible with all Anafi's?
MAVLink compatibility The ANAFI USA platform is compatible with the open source protocol MAVLink v1, that allows real time data exchange between the drone and a control station. ANAFI can be piloted manually or through an automatic flight plan from any MAVLink V1 station, such as QGroundControl.
What actually does it means for a simple Anafi? Not Usa, It is also compatible with all Anafi's?

According to the white paper for the regular Anafi model, it is also compatible with QGroundControl.What actually does it means for a simple Anafi? Not Usa, It is also compatible with all Anafi's?
See pages 18-19 in pdf linked below.
Regular Anafi white paper (not Anafi USA)
https://www.parrot.com/assets/s3fs-public/2020-07/white-paper_anafi-v1.4-en.pdf
Rodrigo del Pedregal
Well-known member
- Joined
- Mar 27, 2020
- Messages
- 87
- Reaction score
- 20
Moskitaba
Member
- Joined
- Apr 12, 2020
- Messages
- 17
- Reaction score
- 3
My anafi experience with QGroundControl:
- use case: build ground 2D orthophoto and 3D models with WebODM
- Computer: I build fly plan with QGroudControl and export it ".plan" format (JSON) with a Survey pattern 85% overlapping
- Computer: I run a selfmade python3 script that converts QGroundControl flightplan to anafi flightplan savedPlan.json
- Phone connected to Computer: I copy FlyPlan directory from computer to phone
- Phone: with FreeFlight6, I activate Flight Plan option, and load new Flight Plan, check-it, save-it (to build correct screenshot), and fly !
My script based on try/error is quite primitive and with a command-line interface. Some savedPlan.json have to modified by hand to work properly.
Does a python programmer interested to improve it?
- use case: build ground 2D orthophoto and 3D models with WebODM
- Computer: I build fly plan with QGroudControl and export it ".plan" format (JSON) with a Survey pattern 85% overlapping
- Computer: I run a selfmade python3 script that converts QGroundControl flightplan to anafi flightplan savedPlan.json
- Phone connected to Computer: I copy FlyPlan directory from computer to phone
- Phone: with FreeFlight6, I activate Flight Plan option, and load new Flight Plan, check-it, save-it (to build correct screenshot), and fly !
My script based on try/error is quite primitive and with a command-line interface. Some savedPlan.json have to modified by hand to work properly.
Does a python programmer interested to improve it?
It is possible. The Anafi (or possible Parrot drones at large) only accept one connection at a time, so you have to power of your controller. But then you can connect your computer to the Parrot's wifi and command it through QGroundControl.
Yes, I confirm that we can connect Anafi via QGroundControl !
So far, I haven't tried the drone outdoors (the weather isn't great), but I can prepare a flight plan with the Anafi connected and video feedback !
My laptop is running with openSUSE 15.2, and QGroundControl install from the RC-Model third-party repo :
qgroundcontrol (from software.opensuse.org)
Don't forget to open UDP ports 14550 and 5600, according to the following docs :
Simulation UDP port description is a bit confusing · Issue #357 · PX4/PX4-Devguide
QGround Control UDP
RPi to Pixhawk MAVProxy Connection Issue
(it looks like port 5600 is for video)
On Troubleshooting section (www.ardusub.com), you can find the No Video problem solving, with all the gstreamer* package to install.
And you can connect the Skycontroller 3 to the PC, it's recognized as a Joystick !
So far, I haven't tried the drone outdoors (the weather isn't great), but I can prepare a flight plan with the Anafi connected and video feedback !
My laptop is running with openSUSE 15.2, and QGroundControl install from the RC-Model third-party repo :
qgroundcontrol (from software.opensuse.org)
Don't forget to open UDP ports 14550 and 5600, according to the following docs :
Simulation UDP port description is a bit confusing · Issue #357 · PX4/PX4-Devguide
QGround Control UDP
RPi to Pixhawk MAVProxy Connection Issue
(it looks like port 5600 is for video)
On Troubleshooting section (www.ardusub.com), you can find the No Video problem solving, with all the gstreamer* package to install.
And you can connect the Skycontroller 3 to the PC, it's recognized as a Joystick !
Hi, I am very interested in the configuration for my ananfi parrot with QGroundControl. I use Win10 and would like to ask you some information:Yes, I confirm that we can connect Anafi via QGroundControl !
So far, I haven't tried the drone outdoors (the weather isn't great), but I can prepare a flight plan with the Anafi connected and video feedback !
My laptop is running with openSUSE 15.2, and QGroundControl install from the RC-Model third-party repo :
qgroundcontrol (from software.opensuse.org)
Don't forget to open UDP ports 14550 and 5600, according to the following docs :
Simulation UDP port description is a bit confusing · Issue #357 · PX4/PX4-Devguide
QGround Control UDP
RPi to Pixhawk MAVProxy Connection Issue
(it looks like port 5600 is for video)
On Troubleshooting section (www.ardusub.com), you can find the No Video problem solving, with all the gstreamer* package to install.
And you can connect the Skycontroller 3 to the PC, it's recognized as a Joystick !
- At the first configuration it asks me which protocol to use, PX4 or Mavlink. Mavlink right?
- Once connected, do I have to perform some kind of calibration or parameter adjustment in the software or do I leave everything as it is?
- How should the controller be connected to the pc? with a usb A to usb A male cable?
- If I use the wifi connection to contact the drone, I cannot use the connection to load maps. Is there any solution?
- Have you tried uploading a mission? Works well?
Thanks in advance and sorry for the thousand questions.

Hi 
No problem, it's been a while I wanted to going back here, in this discussion thread!
Part I: let's reply to the 5 questions
- At the first configuration it asks me which protocol to use, PX4 or Mavlink. Mavlink right?
It seems that we can use PX4 Pro firmware (that's the choice I have done), but I can experiment Mavlink Generic... asap!
(the first message in QGC said: "If you are unsure of the correct values leave them as is.")
As you can see bellow, it worked fine for my test flight.
- Once connected, do I have to perform some kind of calibration or parameter adjustment in the software or do I leave everything as it is?
Except the step to choice the firmware, I made some minor changes in Application Settings (Video Settings, Default Mission Altitude, etc.), and also in Vehicle Setup > Radio for joystick (= the controller) configuration.
But I was surprised by the quick start of this tool")
- How should the controller be connected to the pc? with a usb A to usb A male cable?
It's the same cable as for the charge of the radio: USB-C (Skycontroller) to USB-A (PC).
- If I use the wifi connection to contact the drone, I cannot use the connection to load maps. Is there any solution?
I have the same problem... For my test flight (not connected to the web), the map was in cache and QGroundControl loaded from this.
For me, it was not a "real" problem, the mission was successfully done with the map cache. But you must prepared your mission before the outdoor flying.
- Have you tried uploading a mission? Works well?
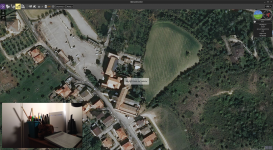
Yes, it's works! Let's rock, back to 2021: (see bellow)
Part II: my test flight and the results
Short video here ->> 2021.09.03_Chapelle_Hochstett.mp4 <<-
And now, the results:
1st passage with flight plan prepared with PIX4Dcapture:
2nd passage with flight plan prepared with QGroundControl:
Part III: photography in planned mission
Photography... but Photogrammetry in fact!
As you can see on the video, I made a survey "double grid" mission, for 2D/3D render (orthophoto and model). The altitude was fixed at 30m (by me) to prepare another flight for my job. But here, 15m would have been enough...
_ Overlap in PIX4Dcapture: 80% (no other option)
_ Overlap in QGroundControl: 80% (Front Lap) and 75% (Side Lap)
First of all, I found QGroundControl much more practical and technical than PIX4Dcapture. But if you want a quick mission planning ("à l'arrache", comme on dit), PIX4Dcapture may be a good solution to start. Note there is a smartphone version of QGroundControl, here: download_and_install -> android
Secondly, I'm a little annoyed because neither of these two software allows you to take WIDE (JPG or RAW) photos, here is why it can be embarrassing:
For photogrammetry processing, the photos must be as "pure" as possible. No correction, no cropping, ... NO RECTILINEAR. The WIDE format is the best choice for avoid problems in calibration process. RAW or JPG, no matter.
Now, look at this interview:
Parrot : questions et réponses avec Cécilia Hage et Martin Liné | p3
At the question: Pourquoi n’y a-t-il plus de stabilisation quand on est en mode photo ? Martin Liné explains why WIDE photo is only stabilized on 2-axis_mechanical, and the RECT stabilized on 5-axis (2-axis_mechanical + 3-axis_electronic). It's good to know that.
Finaly, how can we take photos in WIDE mode, during a planned mission?
_ First option (not a real solution):
Gaël Billon offers a solution to bypass the limitation of PIX4Dcapture:
Shooting in RAW (DNG) with the Parrot Anafi and Pix4D Capture
Also in french:
Prendre des photos en DNG (RAW) avec le Parrot Anafi et Pix4D Capture
_ Second option (must be worked to be a good solution):
Alex "adsnash" comes with his converter, hosted in GitHub:
Flightplan Converter
He writes an entry also here:
Sphinx Bugs and Flightplan Issues
This second option is very interesting: the tools generate a .txt file in QGC WPL 120 format which respects the WP defined by QGC and imposes a "breaktime" on each WP. More options are available, including the ability to take photos in JPEG RECT or WIDE, and also RAW.
"But ESPARUS ONLINE also allows you to choose the type of photo!"
Yes, i heard you. But we can't planned a double (or simple) grid for cartography mission, for example...
So, I have a question for @abant:
Is there a way to convert/adapt the QGC WPL 120 format to load it in FreeFlight 6 (in-app) FlightPlan?
Thank you for your attention.
It was a bit long, but I really enjoyed writing this post!
Thanks to those who were patient enough to read it until the end.
No problem, it's been a while I wanted to going back here, in this discussion thread!
- Part I: let's reply to the 5 questions
- Part II: my test flight and the results
- Part III: photography in planned mission
Part I: let's reply to the 5 questions
- At the first configuration it asks me which protocol to use, PX4 or Mavlink. Mavlink right?
It seems that we can use PX4 Pro firmware (that's the choice I have done), but I can experiment Mavlink Generic... asap!
(the first message in QGC said: "If you are unsure of the correct values leave them as is.")
As you can see bellow, it worked fine for my test flight.
- Once connected, do I have to perform some kind of calibration or parameter adjustment in the software or do I leave everything as it is?
Except the step to choice the firmware, I made some minor changes in Application Settings (Video Settings, Default Mission Altitude, etc.), and also in Vehicle Setup > Radio for joystick (= the controller) configuration.
But I was surprised by the quick start of this tool
- How should the controller be connected to the pc? with a usb A to usb A male cable?
It's the same cable as for the charge of the radio: USB-C (Skycontroller) to USB-A (PC).
- If I use the wifi connection to contact the drone, I cannot use the connection to load maps. Is there any solution?
I have the same problem... For my test flight (not connected to the web), the map was in cache and QGroundControl loaded from this.
For me, it was not a "real" problem, the mission was successfully done with the map cache. But you must prepared your mission before the outdoor flying.
- Have you tried uploading a mission? Works well?
Yes, it's works! Let's rock, back to 2021: (see bellow)
Part II: my test flight and the results
Short video here ->> 2021.09.03_Chapelle_Hochstett.mp4 <<-
And now, the results:
1st passage with flight plan prepared with PIX4Dcapture:
- Preview photos: Chapelle_PIX4Dcapture.jpg
- ZIP archive with photos: Chapelle_PIX4Dcapture.zip
2nd passage with flight plan prepared with QGroundControl:
- Preview photos: Chapelle_QGroundControl.jpg
- ZIP archive with photos: Chapelle_QGroundControl.zip
Part III: photography in planned mission
Photography... but Photogrammetry in fact!
As you can see on the video, I made a survey "double grid" mission, for 2D/3D render (orthophoto and model). The altitude was fixed at 30m (by me) to prepare another flight for my job. But here, 15m would have been enough...
_ Overlap in PIX4Dcapture: 80% (no other option)
_ Overlap in QGroundControl: 80% (Front Lap) and 75% (Side Lap)
First of all, I found QGroundControl much more practical and technical than PIX4Dcapture. But if you want a quick mission planning ("à l'arrache", comme on dit), PIX4Dcapture may be a good solution to start. Note there is a smartphone version of QGroundControl, here: download_and_install -> android
Secondly, I'm a little annoyed because neither of these two software allows you to take WIDE (JPG or RAW) photos, here is why it can be embarrassing:
For photogrammetry processing, the photos must be as "pure" as possible. No correction, no cropping, ... NO RECTILINEAR. The WIDE format is the best choice for avoid problems in calibration process. RAW or JPG, no matter.
Now, look at this interview:
Parrot : questions et réponses avec Cécilia Hage et Martin Liné | p3
At the question: Pourquoi n’y a-t-il plus de stabilisation quand on est en mode photo ? Martin Liné explains why WIDE photo is only stabilized on 2-axis_mechanical, and the RECT stabilized on 5-axis (2-axis_mechanical + 3-axis_electronic). It's good to know that.
Finaly, how can we take photos in WIDE mode, during a planned mission?
_ First option (not a real solution):
Gaël Billon offers a solution to bypass the limitation of PIX4Dcapture:
Shooting in RAW (DNG) with the Parrot Anafi and Pix4D Capture
Also in french:
Prendre des photos en DNG (RAW) avec le Parrot Anafi et Pix4D Capture
_ Second option (must be worked to be a good solution):
Alex "adsnash" comes with his converter, hosted in GitHub:
Flightplan Converter
He writes an entry also here:
Sphinx Bugs and Flightplan Issues
This second option is very interesting: the tools generate a .txt file in QGC WPL 120 format which respects the WP defined by QGC and imposes a "breaktime" on each WP. More options are available, including the ability to take photos in JPEG RECT or WIDE, and also RAW.
"But ESPARUS ONLINE also allows you to choose the type of photo!"
Yes, i heard you. But we can't planned a double (or simple) grid for cartography mission, for example...
So, I have a question for @abant:
Is there a way to convert/adapt the QGC WPL 120 format to load it in FreeFlight 6 (in-app) FlightPlan?
Thank you for your attention.
It was a bit long, but I really enjoyed writing this post!
Thanks to those who were patient enough to read it until the end.
Vaakefjell
Well-known member
- Joined
- Dec 13, 2021
- Messages
- 57
- Reaction score
- 25
Thanks for this!
I’ve been looking for a flight planner that can do terrain follow / photogrammetry for a while, this does look interesting!
I have a couple of practical questions though, that you might help me with?
How is the range? If it connects to your laptop Wi-Fi, I assume it is a lot more limited than the controller? Is there any good (and affordable) solutions for extending it available?
(I did a quick google search, and didn’t find much info - SiK seemed like an option.. Edit: Never mind, that seems to be a completely different frequency solution)
I’ve been looking for a flight planner that can do terrain follow / photogrammetry for a while, this does look interesting!
I have a couple of practical questions though, that you might help me with?
How is the range? If it connects to your laptop Wi-Fi, I assume it is a lot more limited than the controller? Is there any good (and affordable) solutions for extending it available?
(I did a quick google search, and didn’t find much info - SiK seemed like an option.. Edit: Never mind, that seems to be a completely different frequency solution)
Last edited:
I'm not sure, but it looks like the mission is loaded 'in' the drone, and the laptop only follows the trace and the video feedback (and also some logs if they have been activated in QGC).
On YT, I've seen a video with a guy who closed his laptop (with QGC on) during the mission, and the drone continued on its way. I can't find this video anymore, maybe I didn't quite understand what I saw at this time...
But here, another discovery
Here is the post where everything started:
Controlling Anafi Thermal’s speed without the use of optical flow
And the discussion redirects here:
FlightPlan with Olympe
What we must keep in mind is that when the drone is connected via wifi (to the laptop), we just have to type this: (on browser)
Tadaaa!
And we can upload a flight plan, in QGC WPL 120 format (for example), after a conversion from QGC JSON file with Alex "adsnash" convertor! (see above)
I found this feature yesterday, I haven't tried outdoor yet...
On YT, I've seen a video with a guy who closed his laptop (with QGC on) during the mission, and the drone continued on its way. I can't find this video anymore, maybe I didn't quite understand what I saw at this time...
But here, another discovery
Here is the post where everything started:
Controlling Anafi Thermal’s speed without the use of optical flow
And the discussion redirects here:
FlightPlan with Olympe
What we must keep in mind is that when the drone is connected via wifi (to the laptop), we just have to type this: (on browser)
http://192.168.42.1/Tadaaa!
And we can upload a flight plan, in QGC WPL 120 format (for example), after a conversion from QGC JSON file with Alex "adsnash" convertor! (see above)
I found this feature yesterday, I haven't tried outdoor yet...
Vaakefjell
Well-known member
- Joined
- Dec 13, 2021
- Messages
- 57
- Reaction score
- 25
Thaks a lot, this is very intriguing! I see I have a lot of studiyng to do when the kids have gone to bed ")
I'm still hoping for a way to enable a 4G modem via the USB port, like the Bebop 2 had.. That would be a game changer for me...
I'm still hoping for a way to enable a 4G modem via the USB port, like the Bebop 2 had.. That would be a game changer for me...
I managed to get a video stream but I can't setup the radio. Windows, android that manjaro always give me the same error. How did you solve?Yes, I confirm that we can connect Anafi via QGroundControl !
So far, I haven't tried the drone outdoors (the weather isn't great), but I can prepare a flight plan with the Anafi connected and video feedback !
My laptop is running with openSUSE 15.2, and QGroundControl install from the RC-Model third-party repo :
qgroundcontrol (from software.opensuse.org)
Don't forget to open UDP ports 14550 and 5600, according to the following docs :
Simulation UDP port description is a bit confusing · Issue #357 · PX4/PX4-Devguide
QGround Control UDP
RPi to Pixhawk MAVProxy Connection Issue
(it looks like port 5600 is for video)
On Troubleshooting section (www.ardusub.com), you can find the No Video problem solving, with all the gstreamer* package to install.
And you can connect the Skycontroller 3 to the PC, it's recognized as a Joystick !
In windows I can't move the gimball at all, but in manjaro the skycontroller works as an usb ethernet adapter and i can move the gimball
Attachments

Vaakefjell
Well-known member
- Joined
- Dec 13, 2021
- Messages
- 57
- Reaction score
- 25
I'm having the same issue, and also no video.. What settings are you using? There is no Mac specific section in the Ardusub troubleshooting page, and so far my trials have not succeeded.I managed to get a video stream but I can't setup the radio. Windows, android that manjaro always give me the same error. How did you solve?
In windows I can't move the gimball at all, but in manjaro the skycontroller works as an usb ethernet adapter and i can move the gimball
MacOS Catalina
QGroundControl 4.2.0
Anafi Firmware 1.8.2
Controller Firmware 1.8.1
Attachments
I just noticed that in manjaro qgroundcontrol recognise the skycontroller as a joystick but with a different layout. The red warings are there just because anafi is not an ardupilot drone and I think that it can fly but i can't test it right now.I'm having the same issue, and also no video.. What settings are you using? There is no Mac specific section in the Ardusub troubleshooting page, and so far my trials have not succeeded.
MacOS Catalina
QGroundControl 4.2.0
Anafi Firmware 1.8.2
Controller Firmware 1.8.1
For video streaming you should intall gstreamer 1.0 but i don't know if it exist for catalina. The only advice i can give to you is that you could install manjaro on an external memory (pay attention to not delete your internal partition and bootloader) if you are using an intel mac. qground controll is easy to install, just activate the aur repositories.
Attachments
Vaakefjell
Well-known member
- Joined
- Dec 13, 2021
- Messages
- 57
- Reaction score
- 25
Thanks for the suggestion @Sistox , however I did already install gstreamer 1.0, with no difference. I tried different variations of UDP streaming as per QGC setup notes well as connecting to rtsp://anafi.local/live as mentioned in a different forum. No success. Do you mind posting a screenshot of your video settings?
QGC is connected to my Anafi though, and the controller responds in the software, I can arm the drone, and it looks like I can take off and start a mission regardlessly - but indoors with no camera and without knowing if the controls actually work is a bit of a gamble!
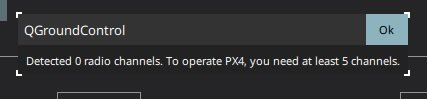
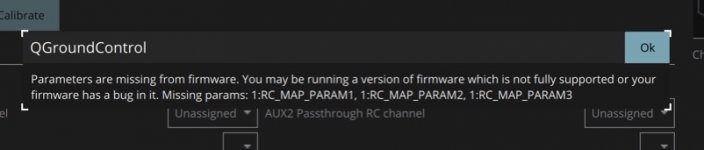
It could very well be that it works just fine as it is, the "errors does not seem to be related to any important functions, it looks like the "1:RC_MAP_PARAM..." signals are supposed to be forwarded to external controls. See below:
 docs.qgroundcontrol.com
docs.qgroundcontrol.com
To use the AUX passthrough channels:
QGC is connected to my Anafi though, and the controller responds in the software, I can arm the drone, and it looks like I can take off and start a mission regardlessly - but indoors with no camera and without knowing if the controls actually work is a bit of a gamble!
It could very well be that it works just fine as it is, the "errors does not seem to be related to any important functions, it looks like the "1:RC_MAP_PARAM..." signals are supposed to be forwarded to external controls. See below:
Radio · QGroundControl User Guide
AUX Passthrough Channels (PX4)
AUX passthrough channels allow you to control arbitrary optional hardware from your transmitter (for example, a gripper).To use the AUX passthrough channels:
- Map up to 2 transmitter controls to separate channels.
- Specify these channels to map to the AUX1 and AUX2 ports respectively, as shown below. Values are saved to the vehicle as soon as they are set.

@Vaakefjell I didn't touch any video configuration. everything is standard. With linux it works instantly.
Attachments



In post #11, all steps are realized with QGC 4.1.3, openSUSE Leap 15.2, in september 2021. Now that QGC 4.2.0 has been released, some changes have been made. The RC connection, as i remember for my flight test, was quite delicate: it was necessary to respect certain steps in the way of connecting the drone / QGC / wifi / RC / etc.
I won't have time to redo a test in real condition for a few weeks. School classes have been closed for a few days, related to a certain virus that is currently circulating... Consequently, kids stay at home, it's another challenge to ensure ...
...
PS: concerning alert messages like "1:RC_MAP_PARAM...", I also had this during my flight preparation, it had no effect afterwards. Some functions are not yet accessible with Anafi, to see with the next update of the drone.
I won't have time to redo a test in real condition for a few weeks. School classes have been closed for a few days, related to a certain virus that is currently circulating... Consequently, kids stay at home, it's another challenge to ensure
...PS: concerning alert messages like "1:RC_MAP_PARAM...", I also had this during my flight preparation, it had no effect afterwards. Some functions are not yet accessible with Anafi, to see with the next update of the drone.
Similar threads
- Replies
- 2
- Views
- 1K
- Replies
- 1
- Views
- 809
